近日,由中國科學技術協會主辦,面向全國青年學子的第十一屆全國青年科普創新實驗暨作品大賽(江蘇賽區)圓滿收官。比賽吸引了衆多高校精英團隊參賽,我院學子憑借卓越的創新思維與紮實的專業技能,在創意作品人機協作組中表現亮眼,載譽而歸。
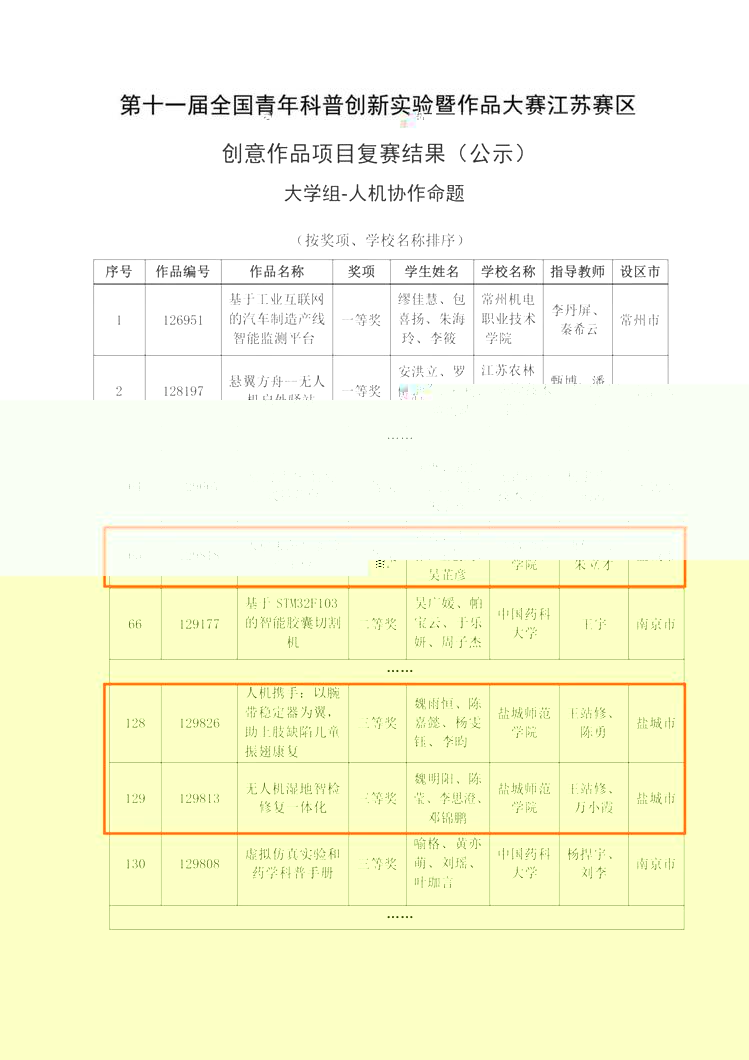
在衆多參賽隊伍的激烈角逐中,我院的“水稻果蔬智能管理平台”項目脫穎而出,榮獲二等獎,“人機攜手:以腕帶穩定器為翼,助上肢缺陷兒童振翅康複”項目榮獲三等獎,“無人機濕地智檢修複一體化”項目榮獲三等獎。

“水稻果蔬智能管理平台”項目
團隊成員:陳可、虞卓睿、王創嫣、吳芷彥
指導老師:唐仕喜、朱立才
項目介紹:本項目旨在開發一套水稻果蔬智能管理平台,通過機器人技術與計算機視覺相結合,實現對果蔬園的高效智能巡檢。系統可精準識别多種作物的生長狀态、病蟲害及雜草情況,并基于數據分析推送合理管理建議。項目突破了傳統人工巡檢效率低、反饋滞後等問題,采用多作物生長期長勢監測、蟲情與雜草智能識别預警等創新技術,結合數據可視化與移動端推送功能,為農民提供便捷的決策支持。經過田間測試,該系統顯著提高了作物管理效率,降低了農藥化肥使用,助力農業智能化與綠色可持續發展。

“人機攜手:以腕帶穩定器為翼,助上肢缺陷兒童振翅康複”項目
團隊成員:魏雨恒、陳嘉懿、楊雯钰、李昀
指導老師:王站修、陳勇
項目介紹:本項目研發了一款專為上肢缺陷兒童設計的腕帶式姿态監測器,通過高精度MEMS慣性傳感器和優化的擴展卡爾曼濾波(EKF)算法,實時監測上肢運動姿态、角速度和穩定性指标,解決傳統康複訓練依賴主觀評估、數據精度不足的問題。創新初始佩戴校準機制确保數據準确性,配套APP提供實時反饋和訓練記錄。樣機動态精度<1.5°,延遲<20ms,輕量化設計(<20g),續航>48小時。已通過初步測試,未來将優化算法、擴展功能并推進臨床驗證,為兒童康複提供精準、便攜的智能輔助工具。
無人機濕地智檢修複一體化項目
團隊成員:魏明陽、陳瑩、李思澄、鄧錦鵬
指導老師:王站修、萬小霞
項目介紹:無人機濕地智檢修複一體化項目是一項融合智能控制與生态修複的創新工程。該項目針對濕地生态系統退化這一全球性環境問題,突破性地将無人機技術與智能控制系統相結合,開發出一套集環境監測與生态修複于一體的智能化解決方案。項目核心技術圍繞飛行穩定性與自主決策兩大關鍵領域展開創新。通過建立六自由度動力學模型并運用Lyapunov穩定性理論,成功解決了無人機在負載重心偏移情況下的飛行穩定性問題,使姿态控制精度達到0.5度以内。同時,基于約束建模和混合整數規劃算法開發的自主決策系統,實現了複雜環境下95%以上的避障成功率,顯著提升了作業安全性和效率。
信息工程學院一直以來高度重視學生科技創新能力的培養,将學科競賽作為提升學生實踐能力和創新思維的重要抓手。未來,學院将繼續深化教育教學改革,不斷完善人才培養模式,以賽促學,培養更多具有創新精神與實踐能力的高素質人才。
審核:郭曉俐 朱立才 王金銘 作者:王金銘 張曉 責編:衛晨瑩
